На одно из сидений качели-балансира надавили с силой F. Определите направление и модуль момента силы в декартовой системе координат качель-балансира. Момент силы определяется выражением M=r×F, r{-2, 0, 0},{0, 0, -10}, где плечо качели, F сила, действующая на сидение.
Ответ:
Решение:
Вектор радиус-плечо \( \vec{r} \) указывает от оси вращения (центра качелей) к точке приложения силы. В условии даны два варианта вектора \( \vec{r} \), но в контексте задачи про момент силы используется единый вектор \( \vec{r} \). Предположим, что \( \vec{r} = \{-2, 0, 0 \} \) — это вектор положения точки приложения силы относительно оси вращения. Сила \( \vec{F} \) действует на сидение. Поскольку конкретный вектор силы \( \vec{F} \) не задан, мы можем найти только выражение для момента силы в общем виде.
Момент силы \( \vec{M} \) вычисляется как векторное произведение радиус-плеча \( \vec{r} \) на силу \( \vec{F} \):
\[ \vec{M} = \vec{r} \times \vec{F} \]
Если \( \vec{r} = \{-2, 0, 0 \} \) (вдоль оси X, например), и сила \( \vec{F} \) действует, например, перпендикулярно этому вектору, то момент силы будет иметь следующее выражение.
Векторное произведение \( \vec{r} \times \vec{F} \) находится по формуле:
\[ \vec{M} = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ r_x & r_y & r_z \\ F_x & F_y & F_z \end{vmatrix} \]
Подставим \( \vec{r} = \{-2, 0, 0 \} \):
\[ \vec{M} = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ -2 & 0 & 0 \\ F_x & F_y & F_z \end{vmatrix} = \mathbf{i}(0 \cdot F_z - 0 \cdot F_y) - \mathbf{j}(-2 \cdot F_z - 0 \cdot F_x) + \mathbf{k}(-2 \cdot F_y - 0 \cdot F_x) \]
\[ \vec{M} = 0 \mathbf{i} - \mathbf{j}(-2 F_z) + \mathbf{k}(-2 F_y) \]
\[ \vec{M} = 2 F_z \mathbf{j} - 2 F_y \mathbf{k} \]
Направление момента силы: Направление вектора \( \vec{M} \) определяется правилом векторного произведения (правило правой руки). Если \( \vec{r} \) вдоль оси X, то момент будет лежать в плоскости YZ.
Модуль момента силы: Модуль \( |\vec{M}| = \sqrt{(2F_z)^2 + (-2F_y)^2} = \sqrt{4F_z^2 + 4F_y^2} = 2\sqrt{F_y^2 + F_z^2} \).
Если бы использовался вектор \( \vec{r} = \{0, 0, -10 \} \) (вдоль оси Z), то:
\[ \vec{M} = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ 0 & 0 & -10 \\ F_x & F_y & F_z \end{vmatrix} = \mathbf{i}(0 \cdot F_z - (-10) \cdot F_y) - \mathbf{j}(0 \cdot F_z - (-10) \cdot F_x) + \mathbf{k}(0 \cdot F_y - 0 \cdot F_x) \]
\[ \vec{M} = 10 F_y \mathbf{i} - 10 F_x \mathbf{j} \]
Направление: Момент лежит в плоскости XY.
Модуль: \( |\vec{M}| = \sqrt{(10F_y)^2 + (-10F_x)^2} = 10\sqrt{F_y^2 + F_x^2} \).
Важно: для полного ответа необходимо знать вектор силы \( \vec{F} \).
Ответ: Момент силы \( \vec{M} = 2 F_z \mathbf{j} - 2 F_y \mathbf{k} \) (при \( \vec{r} = \{-2, 0, 0 \} \)) или \( \vec{M} = 10 F_y \mathbf{i} - 10 F_x \mathbf{j} \) (при \( \vec{r} = \{0, 0, -10 \} \)). Направление и модуль зависят от компонент вектора силы \( \vec{F} \).
Похожие
- Найдите предел функции lim sin 2x x->0 sin 4x
- Напишите уравнение касательной к графику функции в точке с абсциссой x₀= 1 f(x) = √x
- Исследуйте функцию на монотонность и выпуклость: f(x) = (х+1)⁴.
- Найти площадь криволинейной трапеции, ограниченной прямыми x = a, x = b, осью Ох и графиком функции y = f(x): a = 1, b = 8, f(x) = √x.
- Боковая сторона равнобедренного треугольника равна 1, угол при вершине, противолежащей основанию, равен 120°. Найдите диаметр описанной окружности этого треугольника.
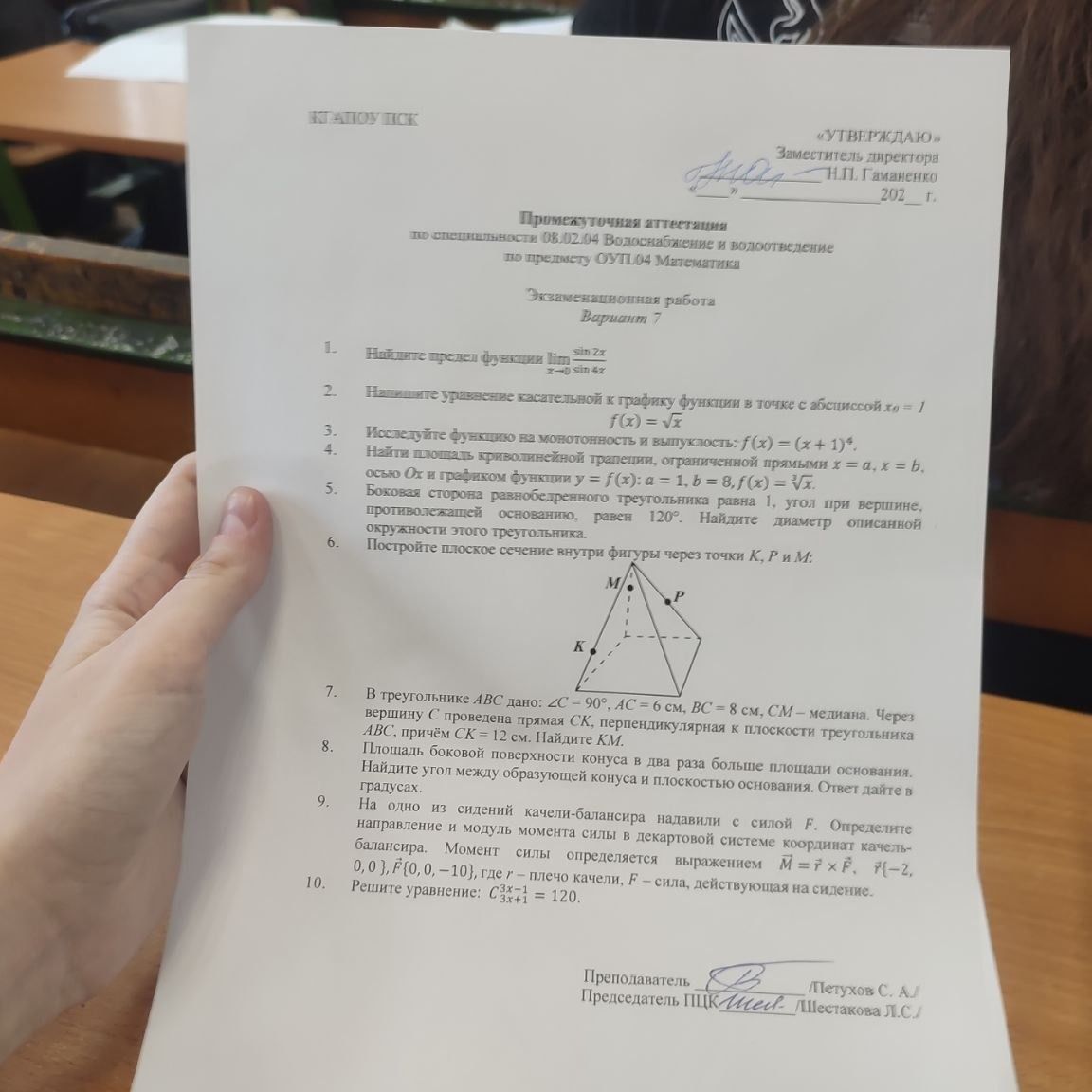
- Постройте плоское сечение внутри фигуры через точки К, Р и М:
- В треугольнике АВС дано: ∠C = 90°, AC = 6 см, BC = 8 см, СМ — медиана. Через вершину С проведена прямая СК, перпендикулярная к плоскости треугольника АВС, причём СК = 12 см. Найдите КМ.
- Площадь боковой поверхности конуса в два раза больше площади основания. Найдите угол между образующей конуса и плоскостью основания. Ответ дайте в градусах.
- Решите уравнение: С³ˣ⁺¹ = 120.
